The inverse of a Lorentz boost is obtained by simply replacing the
relative velocity by its negative.
The transformation formula for a 2d Lorentz boost can be written in the
form of a hyperbolic rotation.
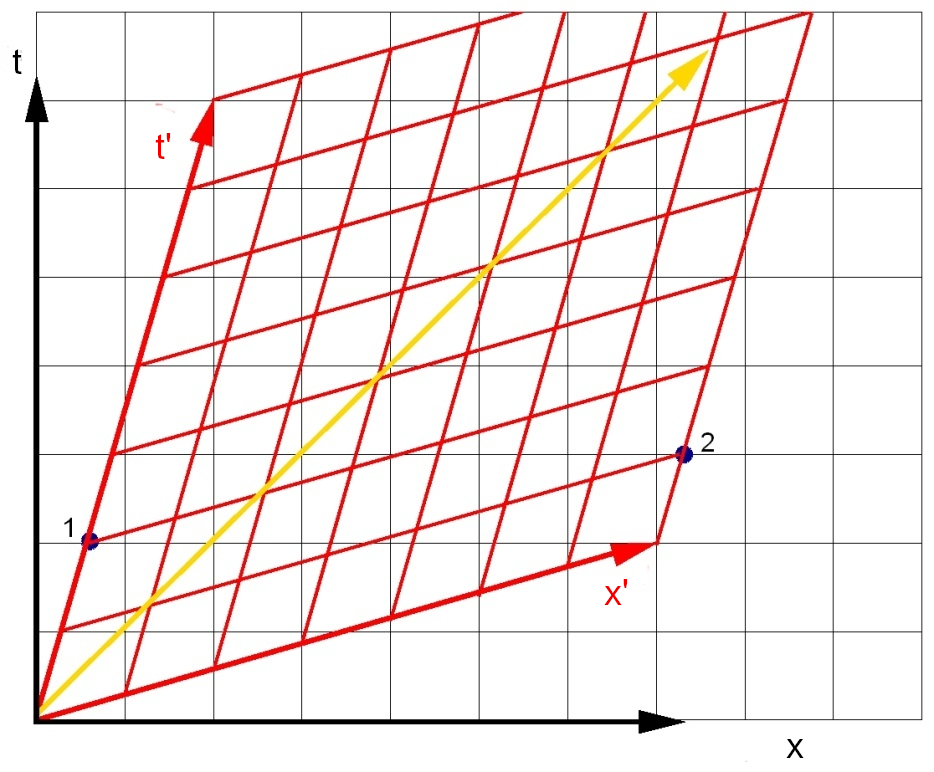
Consider a Lorentz boost with velocity
in the positive
-direction. For simplicity, we assume that the observer
in the stationary frame and the observer
in the boosted frame have set their clocks to
zero at the common origin of the two coordinate systems; see the Minkowski
diagram below.
Fig.5.3 Rotation of space and time
coordinate axes by a Lorentz velocity boost.
In the diagram the lines of simultaneity for the moving observer
are given by
, labeled by
, and the lines of same-locations by
, labeled by
. Thus, the inertial coordinate systems set up
by
and
are related by
5.4
with scale factor
. The inverse relation is
5.5
Since the transformations go in opposite directions, one deduces from the
relativity principle, that each of the two matrices in (5.4),(5.5) must be the
inverse of the other, and this inverse must be a Lorentz boost in the
opposite direction, obtained by simply replacing the relative velocity
by its negative:
5.6
The transformations (5.4),(5.5) were independently obtained by Hendrik Anton
Lorentz (1899) and Joseph Larmor (1900) as the linear coordinate changes that
leave the form of Maxwell’s wave equations invariant. In 1905 Henri Poincaré
demonstrated that these transformations, which he named after Lorentz, form a
group.
Poincaré also noticed that a Lorentz transformation is a rotation in
four-dimensional spacetime about the origin. For the 2d case this is easily
shown by introducing the so-called rapidity
, or pseudo-velocity, through
. Then the transformation of the axes can be described as a hyperbolic
rotation:
5.7
The scale factor
accounts for the effects of time dilatation and Lorentz contraction.
It may be checked by direct calculation that the Minkowski distance is invariant
:
under these Lorentz
transformations.