Figuur
4.8 Plaatsbepaling door bepaling van afstanden tot bekende punten.
Het is mogelijk de plaats van een gebeurtenis, zoals een aardbeving bijvoorbeeld,
vast te stellen via afstandsmetingen.
Neem een plat vlak in je gedachten. Hierop zijn van 2 punten A en B de
coördinaten bekend. Van een derde punt P wordt nu de afstand tot A en B
bepaald. Bij een aardbeving gaat dat als volgt: bekend is op welk tijdstip
(plaatselijke tijd) de beving plaatsvond. Bij ons (in De Bilt, punt B
bijvoorbeeld) wordt enige tijd na dit tijdstip op een seismograaf een beving
geconstateerd. Omdat de snelheid waarmee de beving zich voortplant bekend is, kan
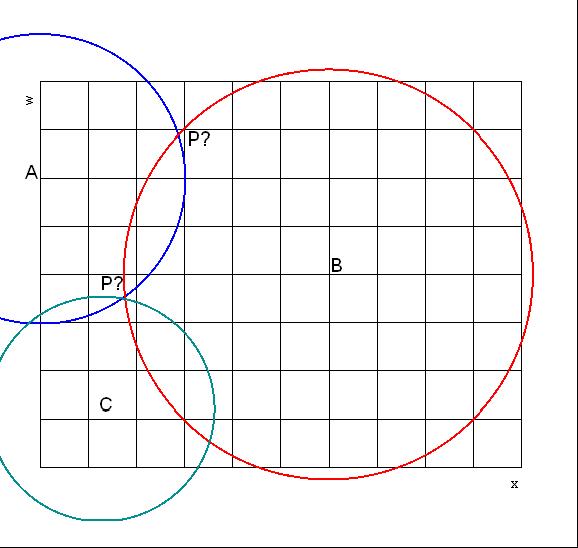
men de afstand van De Bilt tot de plek van de aardbeving berekenen. Zeg dat AP 3
lengte-eenheden is en BP 4. Dan kun je rond A een cirkel trekken met straal 3; P
ligt op die cirkel, alleen is nog onbekend waar. Rond B kun je een cirkel trekken
met straal 4. P ligt ook op die cirkel. Zie figuur 4.8.
Omdat P op beide getrokken cirkels ligt, is P een van de snijpunten van de twee
cirkels. Welk van beide snijpunten het juiste is, valt nog vast te stellen door de
afstand tot een 3e punt C, waarvan de coördinaten bekend moeten
zijn, te meten.
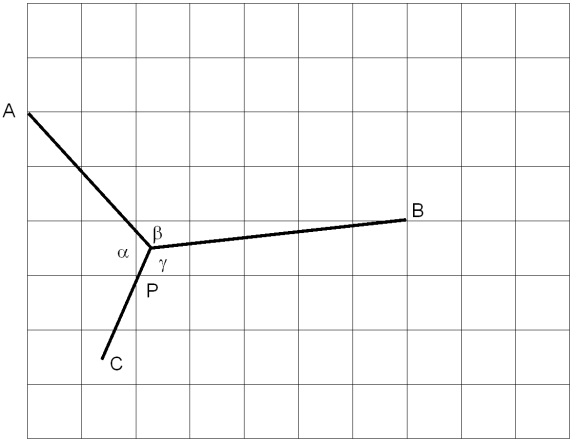
Bij landmeting is het meten van afstanden vaak niet goed mogelijk. Afstandsmeting
wordt daar vervangen door hoekmeting. Weer is de ligging van 3 punten A, B en C
nauwkeurig bekend. In een punt P, waarvan men de coördinaten wil kennen, meet
men de hoeken
. Dit stelt de landmeter in staat de coördinaten van P vast te
stellen. En vervolgens kan P weer dienen als punt met bekende coördinaten om
die van andere vast te stellen.
Figuur
4.8b
Een vergelijkbaar systeem wordt gehanteerd bij plaatsbepaling met behulp van GPS
(Global Positioning System). De bekende punten A, B en C zijn in dat geval
satellieten die rond de aarde draaien. Zij zenden signalen uit met onder andere de
volgende mededelingen:
de tijd waarop het signaal wordt uitgezonden
door welke satelliet het wordt uitgezonden
Deze signalen reizen met de lichtsnelheid naar de GPS-ontvanger. Uit het tijdstip
van ontvangst valt nu te berekenen hoelang het signaal onderweg is geweest.
Hieruit is, met de bekende lichtsnelheid, de afstand tussen satelliet en ontvanger
te berekenen.
Door dit drie maal te doen met de tijd- en plaatsgegevens van de satellieten A, B
en C is de plaats van de GPS-ontvanger op het aardoppervlak te berekenen. En om
helemaal 'save' te zijn wordt nog de afstand tot een vierde satelliet bepaald,
zodat de invloed van meetonnauwkeurigheden klein gemaakt kan worden.
Bij de toepassing van deze techniek spelen, behalve tal van technische problemen,
ook een stel fysische problemen een rol. We noemen hier die problemen die met de
relativiteitstheorie van doen hebben.
De satellieten bewegen ten opzichte van de ontvanger op het aardoppervlak.
Hierdoor lopen de satellietklokken langzamer dan die in de ontvanger! Het is
daarom nodig de klokken van de satellieten regelmatig te synchroniseren met die
op aarde.
Satelliet en ontvanger vormen géén inertiaalstelsel. Je mag dan niet
meer met de speciale relativiteitstheorie rekenen, maar moet de algemene
relativiteitstheorie gebruiken.
De satelliet bevindt zich hoog boven de aarde. Daar is het gravitatieveld
zwakker dan bij ons. Klokken lopen dan juist sneller dan bij ons, wat opnieuw
met de algemene relativiteitstheorie in rekening gebracht kan worden.